

三维实景建模,新的建模软件结合无人机倾斜摄影有巨大优势,相比较传统的建模方法,效率提高,成本降低,新的方式将慢慢取代落后的建模方式。传统的低空摄影测量和三维建模技术已经不能满足当下快速精细建模的要求了,当前,三维建模已经成为测绘数字化过程中不可缺少的重要一环,科技的发展,在Smart3D 软件在快速低成本实现精细三维模型的构建、大比例尺DOM 的制作以及三维模型的可视化展示等方面拥有巨大优势。借助倾斜摄影测量技术和Smart3D 软件实现精细三维模型的快速构建,规范和分析了数据获取的主要流程和数据处理的关键技术,对比和探讨了利用点云和影像数据建模的精度和优缺点,总结了三维建模过程中相关数据的质量要求和评价标准。

–倾斜摄影三维建模
由于传统的建模方法效率低,劳动强度大、生产成本高等缺点,将逐渐被淘汰。传统低空摄影测量技术,广泛应用在大面积区域调查、安全监测、灾害应急、环境保护等诸多领域。通过无人机搭载传感器,快速、高效、便捷地获取高分辨率影像数据,从而制作DOM( 数字正射影像) 和DEM( 数字高程模型) 。但是由于传感器和数据处理算法等软硬件的限制,并不能快速高效地还原最真实的三维场景。
无人机摄影测量具有灵活快速、高效便捷、成本较低、影像分辨率高等特点大大促进了倾斜摄影测量技术的发展。倾斜摄影测量彻底改变了人工建模的弊端,通过自动化的数据处理手段大大加快了大场景精细三维模型的生成速度。倾斜摄影测量技术也颠覆了传统低空摄影测量只能从垂直角度获取数据的局限,在无人机上同时搭载多个传感器,从多个角度获取影像数据,能够更加真实全面立体反映地表物体的局部细节和整体层次。目前,典尚设计-通过倾斜摄影测量技术可以获取丰富的纹理信息数据,生成密集三维点云和TIN 格网模型,结合自动化实景建模模型,实现三维场景的快速、高效、低成本的真实还原,为诸多项目提供了建模服务。

2 数据获取的主要流程:以下为倾斜摄影的流程讲述
倾斜摄影测量主要有地面飞控系统、无人机、控制测量三个部分组成。飞控部分主要规划设计无人机的飞行航线、航高、以及对无人机飞行监视控制和数据通信等,无人机部分主要由机载定位系统和多视相机组成,控制测量主要是航测区域的控制网设计和像控点的测量。无人机航拍前需要对测区进行现场踏勘,首先根据已有GPS 控制点位去合理布设像控点,像控点的数量和位置依据实际测量规程要求的精度和测区范围的大小均匀布设。其次根据申请的空域时间和范围合理规划飞行航线,保证影像的航向重叠、旁向重叠、分辨率等符合作业要求。在航线的设计中,一般设置30%的旁向重叠度,66%的航向重叠度。对于模型的自动生成,旁向重叠和航向重叠会要求更高。再次要在已知的高精度点位上架设基站,在无人机起飞规定时间前开机,降落后在规定时间内关机。在测量时,需要量取天线高,记录基站开关机的具体时间,并进行像控点的测量。最后组装无人机和设置相机参数,实施无人机航拍,飞行结束后,分别下载无人机数据和基站数据。
在影像数据的获取过程中,会受到相机镜头畸变在内的仪器本身以及天气变化在内的外界自然影响而产生的不可避免的误差。如果不对原始影像进行预处理,会直接影响到后期成果数据的精度和质量。影像数据后续处理基于数字摄影测量、多视影像联合平差、计算机视觉等相关算法,数据处理过程中无须人工干预,具有高伸缩性和高效性。利用AgisoftPhotoscan、Smart3D capture 等相关软件,在有无控制点的情况下,都可以实现多视图多视角的三维重建,还原最真实的三维场景。典尚设计-同时利用相关数据处理软件实现对三维模型的高度、面积、长度、体积等实现精准量测。倾斜摄影测量技术获取多视角的高分辨率影像数据,并实现大场景精细三维场景的最真实还原。数据获取处理的主要流程,如图1 所示。

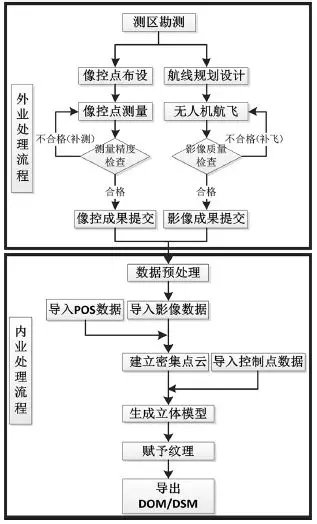
图1 数据获取处理技术流程
3 数据处理的关键技术3. 1 多视影像密集匹配和空三解算由于倾斜摄影测量获取的影像是范围广而且多视角的,各个航带间的影像视场差别较大,倾斜立体影像间往往存在较大的几何畸变,增加了影像匹配的难度。多视影像的密集匹配就是寻找连接点构网的过程,同时消除多视影像数据中的冗余信息。影像匹配的算法分三类: 灰度匹配、特征匹配和关系匹配,匹配的共性就是在影像上按照匹配策略需找同名点。基于SIFT 算法为代表的特征匹配,匹配的误差较多、耗时较长。在倾斜摄影测量中导入处理影像数据,同时添加POS 数据可以辅助多视影像的匹配,依据POS 数据可以粗略得到原始影像的外方位元素,进行相关算法的粗匹配剔除一些误匹配点,进而再重新精确匹配。空三解算的就是影像间精确几个拓扑关系重建的过程。根据地面布设的像控点,并以共线方程为基础,进行光束法区域网平差。
3. 2 多节点并行计算的实现并行计算是将计算任务分解成多个并行的子任务,分配到具有并行处理的计算节点上,通过各节点上的处理器相互协同,共同解算并行子任务,从而使得计算加速。并行计算系统主要有并行机,并行算法和并行编程三个重要组成部分,如图2 所示。并行计算的基础是并行机,并行机的核心组成是处理器、内存和互联网络。通过互联网络将并行机串联起来,在并行机上实现影像数据的同步、共享和访问。针对特定应用类型进行互联网络拓扑设计,可以极大提升并行计算能力和效率。并行算法的主要设计分为任务分解、通信设计、任务聚合和处理器映射四个步骤,根据并行算法通过并行编程环境编制为程序并运行得到计算结果。
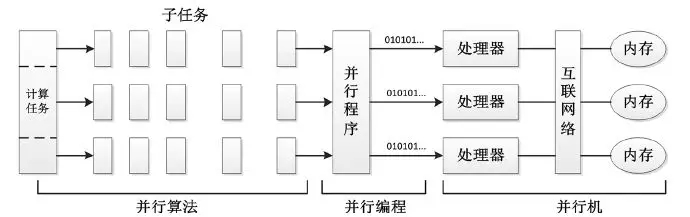
图2 并行计算结构图
影像数据的密集匹配和空三解算可以在任何一台并行机上实现,在模型重建过程中,将模型划分为若干个大小长度相等的规则瓦块。依据并行算法和程序,通过互联网络使得串联的并行机同时对划分好的规则瓦块进行并行计算。通过并行计算的实施,极大地提高三维模型计算和生成的速度,同时降低了三维模型对计算机硬件的配置要求。
3. 3 面向GPU 的LOD 可视化在倾斜摄影测量的三维模型的可视化需要CPU和GPU 协调合作完成,纹理映射、模型绘制以及场景的渲染主要依靠GPU 的性能和效率。GPU 具有小缓存多核的架构和快速高效的并行计算能力,适应GPU的数据结构必须能够充分发挥GPU 高速处理和高效渲染的能力,避免计算机硬件数据带宽冲突问题。倾斜摄影测量生成的模型数据进行分块分级处理,对于生成的瓦块数据建立四叉树或者八叉树的空间索引模型,从而提高数据的读取效率,减少数据 I /O 操作,加快数据的调度和绘制。基于四叉树索引结构的多细节层次模型( LOD) ,如图3 所示。在三维模型数据生成过程中,通过不同的简化比例得到三维模型数据的LOD,一般至少有5 层~6 层,多的可达10 层左右。
再下部分就是数据质量分析与比较了,这部分内容相对枯燥,也就不再多赘述了。总结来讲,面对倾斜摄影测量技术快速生成的大场景三维模型,仍需要进一步对模型开发和利用,模型单体化和数据的融合是倾斜摄影测量面临的亟待解决的问题。
倾斜摄影商务沟通13392874600
典尚设计-倾斜摄影、实景三维建模、航拍
商务沟通
0755-83549300 13392874600
QQ2596426445
网址:htts://www.dillsun.com
 关注微信公众号
关注微信公众号