

基于无人机倾斜摄影实景三维模型生产矿区地形图的工艺流程,并通过应用实例制作了矿区 1: 1 000 地形图,通过实地精度检查,验证能够满足 1: 1000 矿山地形图测绘的精度要求,为采用此方法生产矿山大比例尺地形图提供参考。
倾斜摄影-无人机航拍在矿山测量测绘中应用
典尚设计-倾斜摄影商务沟通13392874600

矿山三维模型是各种复杂信息的空间载体,是数字矿山建设中的基础数据。实景三维模型作为三维空间数据生产的重要技术手段,越来越受到人们的重视。邓勤等通过矿道模型与矿山地表实景三维模型建立地表地下一体化三维模型实现矿道经济事故辅助指挥功能。王果等基于无人机倾斜摄影技术进行了全自动露天矿边坡三维重建。曹希等利用普通民用级无人机应用于数字化矿山的三维建设。马国超等引用三维激光扫描和无人机倾斜摄影等三维测量技术开展露天采场安全监测融合应用研究。随着矿山开采对环境的破坏,为对矿山环境进行及时修复,对大比例尺地形图的快速获取和更新有着迫切的需求。但传统的大比例尺地形图生产,都需要外业工作人员到实地测量或者调绘,存在作业效率低、出图时间长、成本高、安全保障差等缺点。随着无人机倾斜摄影及实景三维建模软件的发展,三维模型的获取更加快速便捷。具有高精度地理坐标的实景三维模型为大比例尺地形图制作奠定了基础。康学凯等利用实景三维模型对 0.35 km2 居民区进行了数字化测图生产研究,俞建人等对实景三维模型的房檐改正方法进行了分析,而以地形地貌为主的矿区以此方法生产大比例尺地形图的应用研究较少。
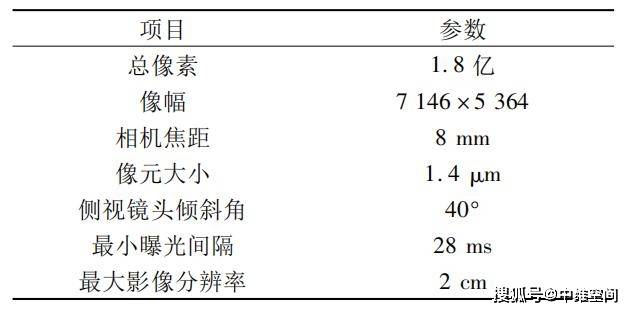
通过小型无人机搭载 5 镜头相机的倾斜摄影测量系统,对某矿区( 约 1.7 km2 ) 进行倾斜摄影测量,获取高精度的三维实景模型,并在三维实景模型上进行地形地貌采集,快速制作了大比例尺地形图,获得了满足 1: 1 000 精度要求的矿山地形测绘成果。1、无人机倾斜摄影系统倾斜摄影测量技术通过集成飞行平台、导航系统和倾斜摄影测量系统,从而获取地表物体多视角影像,为三维建模提供丰富纹理信息。同时,通过先进的定位技术赋予影像精确的地理位置信息,在倾斜影像上真正实现“非现场”量测与分析。其中,飞行平台为无人机,GNSS 导航和惯性导航系统用于获取位置和姿态信息,倾斜摄影系统则获取地表物体多角度的影像信息。本次采用青蜓 5S 多旋翼无人机( 图 1) ,45 min飞行时长( 含最大任务载荷) 。搭载青蜓航空摄影仪,航摄仪具体参数见表 1。

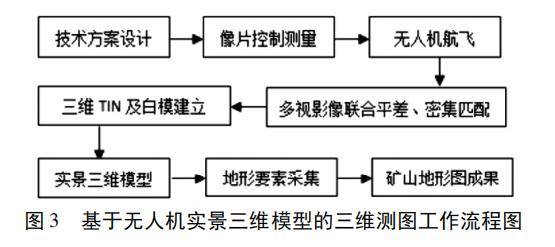
2、工作流程基于无人机倾斜摄影实景三维模型的矿山地形图测绘作业流程如下①技术方案设计( 包括航摄设计) ; ②在测区选择特征点进行像片控制测量,无特征点区域先布设地面标识; ③无人机航空倾斜摄影; ④多视影像联合平差及密集匹配; ⑤三维 TIN 及白模建立; ⑥纹理映射实景三维模型生成; ⑦基于实景三维模型进行矿山大比例尺地形图要素采集生产; ⑧矿区大比例尺地形图成果。具体作业流程见图 3。
3、应用实例分析3.1 测区概况及成图要求测区为某矿区废弃矿山,为进行废弃矿山地质环境治理,制作该矿山实景三维模型及地形图。测区为不规则多边形( 图 4) ,测区面积约 1.7 km2。测区海拔约 30 ~ 110 m,高差约 80 m,地形为丘陵,无高山,无高大建筑物,飞行空域良好。测图比例尺为 1: 1 000,地形为丘陵,精度要求平面位置中误差为 ± 0.6 m,等高距为 1 m,等高线插求点中误差为 ± 0.5 m。3.2 像片控制测量本次像控点采用区域网布点方式,像控点基本按照400 ~ 500 m 间距布设1 个像控点,共布置14个像控点,其中 10个控制点参与平差计算,4个控制点用做空三检查点。像控点施测采用基于网络cors站的网络 RTK 测量方法,每个控制点独立观测 2 次,平面坐标系统采用“2000 国家大地坐标系”,高程基准为“1985 国家高程基准”。通过检查及计算,像控点平面中误差 0.023 m,高程中误差 0.034 m,满足像片控制点相对于最近基础控制点的平面位置中误差,平地、丘陵地不超过 0.12 m,高程中误差,平地、丘陵不超过 0. 1 m 的要求。3.3 倾斜摄影航飞航摄设计以青蜓无人机配套的地面监控软件青蜓 1 系列航空摄影系统,以谷歌影像数据为基础背景图,确定任务区域范围,依据设计的地面分辨率、相对航高、基线、航线间隔等信息,完成航线设计( 图 4) 。本次设计相对航高 368 m,航向重叠度 80% ,旁向重叠度 60% ,航线间间距 198 m,航向拍照间距 74 m,像片地面分辨率 8 cm,本测区共飞行4架次,获 取 0.08 m 分辨率的倾斜摄影影像1 015张。

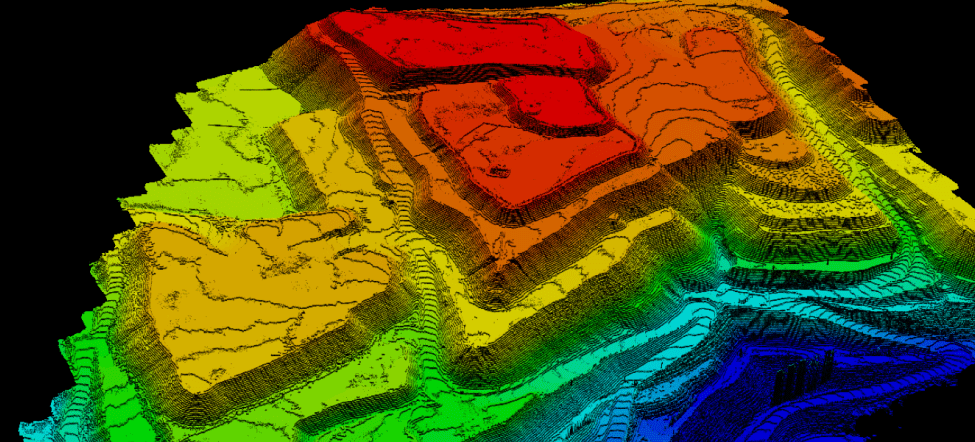
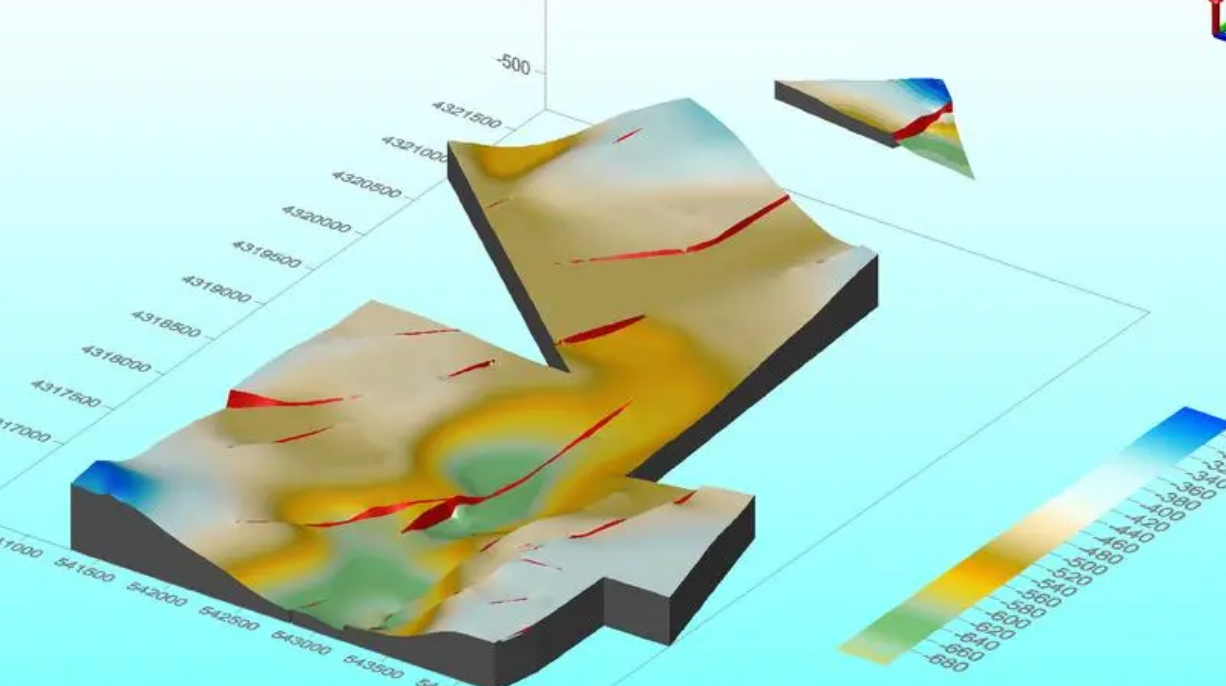
图 4 测区范围及航线设计3.4 实景三维模型制作目前市场上实景三维建模软件主要有街景工厂StreetFactory、ContextCapture、PhotoMesh、DP - smart等软件。本次应用实验采用 ContextCapture 软件,该软件是基于图形运算单元 GPU 的快速三维场景运算软件,无需人工干预从简单连续影像中生成最逼真的实景真三维场景模型。实景三维模型包括以下过程,首先为多视影像联合平差,本次 10 个像控点参与平差计算,4 个像控点进行空三检查,检查结果为检查点平面误差 4.1 cm,高程误差 22.5 cm,参照《数字摄影测量 空中三角测量》规范,满足 1: 1 000 空三规范要求; 其次多视影像联合平差及密集匹配后,生成三维 TIN 及白模,最后通过纹理映射后生成实景三维模型( 图 5) 。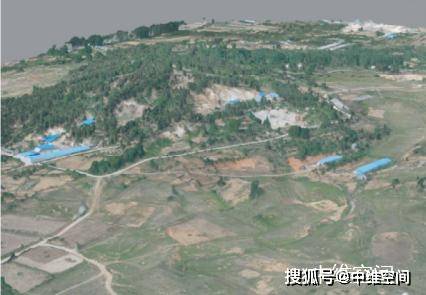 图 5 矿山实景三维模型3.5 矿山地形要素采集本次基于实景三维模型的矿山地形要素采集,使用清华山维 EPS 三维测图软件模块( 试用版) 。基于实景三维模型的 EPS 的 DLG 测绘数据采集,采用二三维一体化,实现测量外业工作的内业化,二三维符号一致、二三维编辑联动,快速简易的采集方法,媲美航测。本测区矿山地物主要为地形地貌,另外包含道路、水系、少许简单房屋建筑物等,所以侧重于地形要素的采集。通过 EPS 软件加载实景三维模型 osgb格式数据,无须佩戴立体眼镜,直接在带有真实地理坐标信息的实景三维模型上进行地形要素采集( 图 6) 。本次参照《工程测量规范》中,1: 1 000 地形点采集间隔,本次在实景三维模型上共采集地形点14 210 个( 图 7) ,通过地形点生成等高线( 等高距 1 m) ,图 8 为生产的山体等高线,图 9 为生成的废弃矿坑等高线,图 10为本次在实景三维模型上采集地理要素形成的矿区地形图。
图 5 矿山实景三维模型3.5 矿山地形要素采集本次基于实景三维模型的矿山地形要素采集,使用清华山维 EPS 三维测图软件模块( 试用版) 。基于实景三维模型的 EPS 的 DLG 测绘数据采集,采用二三维一体化,实现测量外业工作的内业化,二三维符号一致、二三维编辑联动,快速简易的采集方法,媲美航测。本测区矿山地物主要为地形地貌,另外包含道路、水系、少许简单房屋建筑物等,所以侧重于地形要素的采集。通过 EPS 软件加载实景三维模型 osgb格式数据,无须佩戴立体眼镜,直接在带有真实地理坐标信息的实景三维模型上进行地形要素采集( 图 6) 。本次参照《工程测量规范》中,1: 1 000 地形点采集间隔,本次在实景三维模型上共采集地形点14 210 个( 图 7) ,通过地形点生成等高线( 等高距 1 m) ,图 8 为生产的山体等高线,图 9 为生成的废弃矿坑等高线,图 10为本次在实景三维模型上采集地理要素形成的矿区地形图。

图 6 基于实景三维模型的地形点采集
图 7 地形点采集全图
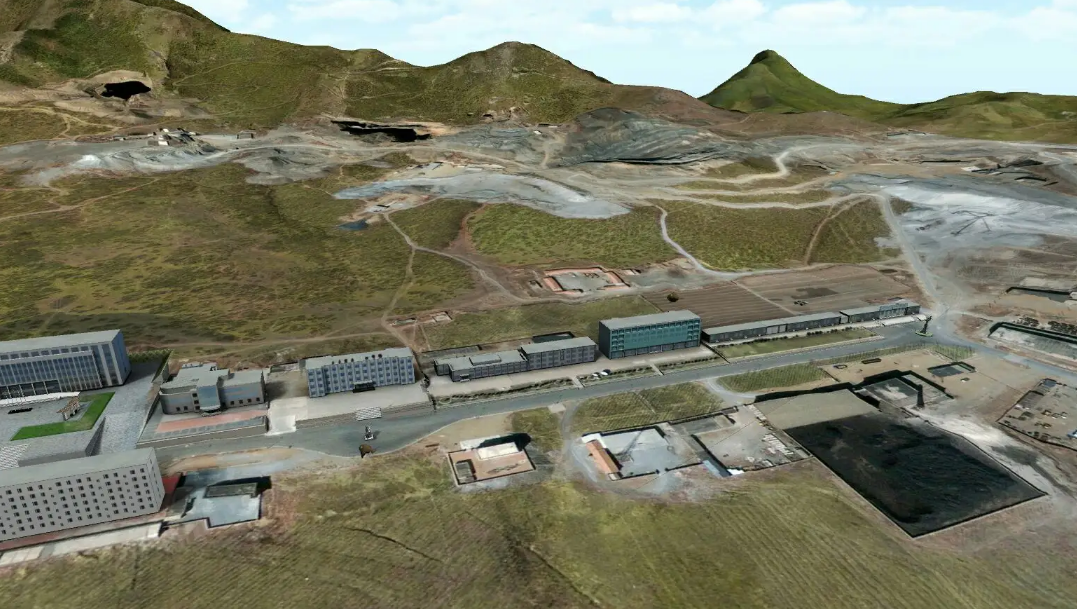
图 8 山体等高线生成

图 9 废弃矿坑等高线生成
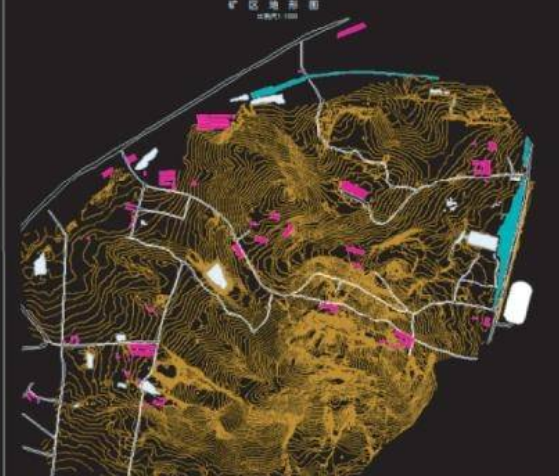
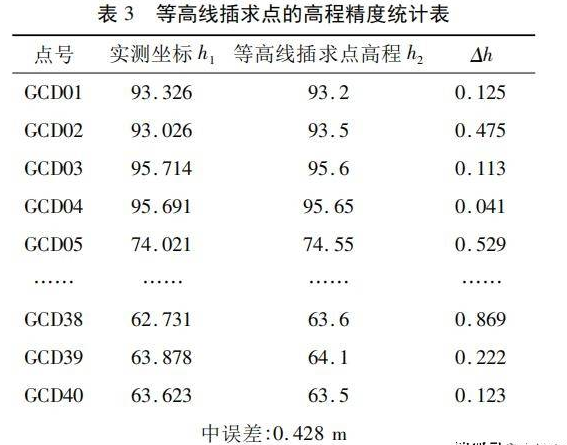
图 10 矿山地理要素采集成图3.6 精度分析本次矿区主要侧重于地形要素的采集,本次通过在实景三维模型上直接采集高程点,然后通过采集的高程点生产等高线。通过实地采集地形高程点,与生成的等高线高程进行对比,进行等高线精度统计。通过实地采集 20 个特征点包括房屋角点、道路交叉点等,计算出平面精度 29.2 cm( 表 2) ,通过实地采集 40 个高程点,计算得出等高线插求点的高程
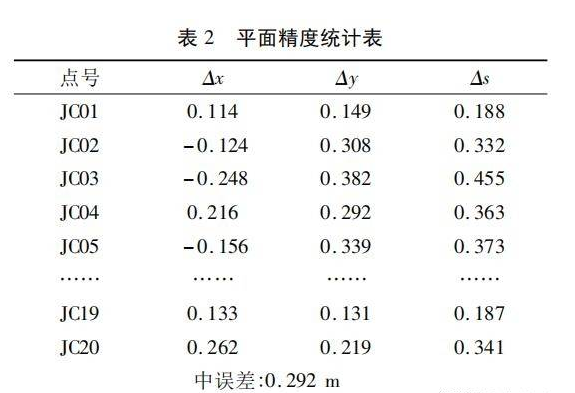
精度为 42. 8 cm( 表 3) ,满足 1: 1 000 丘陵地区地物点平面位置点位中误差 60 cm 及等高线插求点高程中误差 50 cm 的精度要求( 注: 1: 1 000 丘陵等高距1 m,等高线插求点中误差为 1 /2 等高距) 。
现阶段专业建模软件可快速进行实景三维建模,节省了大量人力财力。实景三维建模具有生产速度快、模型精度高的特点,为大比例尺地形图生产提供了新的生产方式。本次应用实验采用小型无人机搭载 5 镜头倾斜相机,获取矿区 8 cm 高分辨率原始影像,快速建立实景三维模型,基于实景三维模型,对矿区进行了地理要素采集。其中在地形地貌要素采集中,通过在实景模型上直接采集地面点的高程数据,生产矿区等高线,通过精度验证,能够满足 1: 1 000 比例尺成图精度要求。基于实景三维模型的大比例尺地形图的生产,较之传统外业实测地形图,将减少外业成本; 而较之常规摄影测量立体测图,人工干预较少,另外可减少了外业调绘工作量及内业成图编辑工作量,大大降低了生产成本,提高了作业效率。但无人机倾斜摄影三维建模具有很大的优势,但无人机续航能力差,载重有限,作业面积有限,而且无人机搭载的相机一般都不是专业测绘相机,航高较低,风大时影响飞行质量,对三维倾斜模型精度造成影响,也限制了无人机倾斜摄影测量在测绘领域更深的应用,故探索无人机倾斜摄影测量精度影响因子、优化作业模式,提高模型精度是值得今后研究的问题。
典尚设计-倾斜摄影、实景三维建模、航拍
商务沟通
0755-83549300 13392874600
QQ2596426445
网址:htts://www.dillsun.com
 关注微信公众号
关注微信公众号